Staying Current
Last year, after my IFR currency expired by a couple of days, I set a goal to go out every other month and shoot three approaches with a hold. To be “current” which isn’t necessarily the same as “proficient, you must have 6 approaches, one hold and intercept and track courses using electronic navigation systems. Life just goes by faster and faster, and if you don’t have a plan to stay current you will look at your logbook one day and realize you are “expired.”
Last year when my currency lapsed I had plans to go shoot approaches but the weather and scheduling conflicted. For an approach to count you must either be in IMC (Instrument Meteorological Conditions ie: “the clouds”) after passing the Final Approach Fix (FAF) or under a view limiting device with a safety pilot and fly it to the minimums for the approach.
Why not go shoot approaches on an overcast day? The FAF on the RNAV 24 approach into Fullerton has a crossing altitude of 2,000′. There are many times that I have spent 30 to 40+ minutes in the clouds on an arrival and approach, only to break out somewhere between 2,500-4,000′ and can’t log the approach because I broke out too early. I could go up on a day that is overcast at 2,500′ on an IFR flight plan to do approaches for currency, but I would need to take a safety pilot and be “under the hood” until the minimums to count the approach. That would work, but the more efficient method is to go on a VFR day when you can just fly the approach under the hood, go missed after reaching minimums, and get vectored to either do the same approach again or fly a different one.
After setting my goal last year I did fairly well flying approaches every other month. Then life got in the way, and I found myself again needing 3 approaches and a hold before the end of the month. Once again, schedules and weather didn’t cooperate and it would be the 5th of the next month before I was current again.
RNAV 26R at KCNO
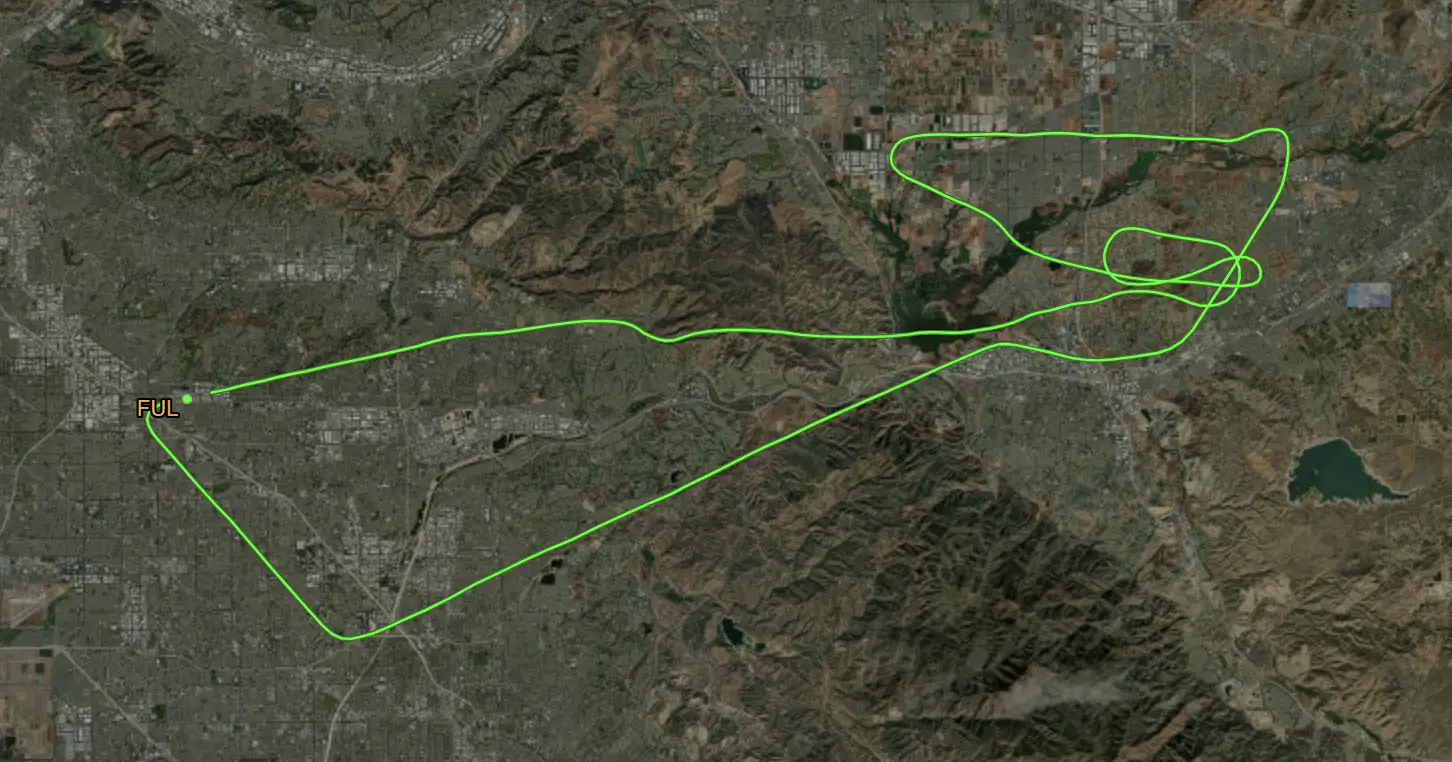
On the 5th of April, in the morning before it got busy with all the training flights and ATC go too saturated for practice approaches, I met a friend at the airport to go get current. I planned the regular round robin flight of the RNAV at Chino (KCNO), a hold at Paradise VOR (PDZ), the GPS-A at Corona (KAJO), and then the RNAV back into Fullerton (KFUL).
I coordinated flight following with Ground at KFUL and we were handed off to SoCal Departure just after making the crosswind turn. ATC cleared us to 3,000′ and I pointed us toward PDZ, the normal point to begin getting vectored onto the approach into KCNO.
When we checked in with the next controller I requested the approach at KCNO and was told “on request” which was followed shortly with “depart Paradise heading 080.” When flying IMC I always use the auto-pilot. It is much more accurate than I am, and I can set headings/altitudes and monitor that it is doing what I want. However, when flying with a safety pilot I hand fly without the auto-pilot to keep those skills up just in case the auto-pilot decides to quit on me.
The winds were squirrely and presented some challenges to the flight. At 3,000′ they were out of the northeast around 30mph, but on the ground they were light out of the west. This meant they were landing to the west, but you had a quartering tailwind on the approach until you descended down through a slight windshear level. The biggest challenge was the quartering tailwind that had my groundspeed coming down final much higher than normal, giving less time to descend. The windshear level presented itself in the form of us both bouncing our heads on the top of the cabin. We arrived 300′ high due to the increased groundspeed and if we had been intending to land it would have resulted in a go around.
GPS-A at KAJO at RNAV 24 at KFUL
**Note that the GPS-A is no longer available as of 4/17/2025 and has been repalced by the GPS-B.**
Chino Tower sent us back to SoCal and I checked in while turning to a heading back to PDZ, climbing out to 3,000, and setting up the hold and next approach in the navigation, all while hand flying. It would have been a simple task with the auto-pilot on, but the task saturation is good practice.
Flying a hold on auto-pilot is simple, you just sit back and watch it do its thing as it compensates for winds. Hand flying with a strong crosswind is a different story and the result, while passable, was not something I was proud of. I did better getting down, crossing the missed approach point only 100′ high. It’s easy enough to enter the pattern from there and make the landing, that is unless you need that last 100′ to get below the clouds on a real IMC day, at which point you’re going around and trying again.
I made the call on the CTAF (Common Traffic Advisory Frequency) for KAJO before switching back to SoCal who gave me direct to LEYMI to begin the approach back to KFUL. As is typically the case, by the time I was on the third approach of the flight I was feeling dialed in and flew it smoothly on speed with the needles centered all the way to 900′ where I took the view limiter off and saw the runway right in front of us. The first approach hand flying is usually pretty rough, passable, but rough. It gets better on the second and the third feels good.
After landing we talked about the flight and she said, “We should trade off each month as safety pilot to fly approaches.”
“Sure,” I responded. That would have us both flying approaches every other month and staying current. Similar to my goal from the previous year, but now there’s two of us to hold each other accountable.